Robot S-R 1
For a while now, I have been working on a robot. I have made many parts to it, but it is still not functional. I have some pictures that I have rendered of what I would like the final version to look like. I will have more info on this when I have time.
 |
 |
|
The first thing you should do before you start building a robot I'd decide what functions it will serve so that it can be built efficiently. I decided that I wanted mine to be a mobile camera. After you decide what you want it to be, you need to find/make a shell. I got mine from an abandoned robot project, called Mesac, from a local scout post that my dad was a part of. It uses the tank tread system. Unfortunately the treads are gone, and I need to buy new ones that cost 80 bucks a piece, so I've been holding off on it. If you know of anyplace that makes a 1 inch tread in custom lengths for less than $80, please let me know. :) |

This is the shell, none of the electronics are inside...yet... |
|
After I fixed the shell a bit I started worrying about the insides and the camera. I bought a camera and wireless video transmitter/ receiver from X-10.Theirs is pretty nice and compact. I then got a dome, to put the camera inside of, from http://futurebots.com. |
 I couldn't find a small pan and tilt unit for mini cameras, so I tried a few designs and this one with two servos was the smallest one I could make. It gives the camera 360 degrees pan and 180 degrees tilt.
This is the X-10 Transmitter, reciever, and camera. It's compact but the range is only 150 ft.
This is the back of the transmitter |
|
I decided that mine will be remote control at first, but after it is finished to my satisfaction I will hook it up to an old PowerBook or Palm Pilot to make it a true robot by moving without the assistance of humans. Right now I'm hooking it up to an old helicopter control. The left stick controls the pan and tilt of the camera, and the right stick controls the actual robot. On the right stick the x axis controls the left tread on the robot, and the y axis controls the right tread, so if I push the stick to the upper right hand corner, the robot moves forward, and if I move the stick to the bottom left corner it moves backwards. And the I can rotate the robot by moving the stick to the upper left hand corner or lower right hand corner. |

Here is the remote control I am currently using. |

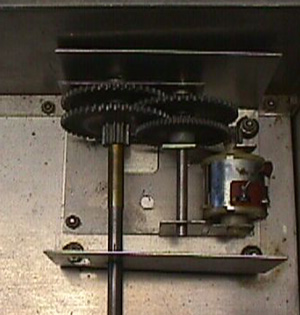
This is the gear-down unit that drives the wheels.It has a very strong torque.
More to come soon...
- http://www.robotstore.com/has lots of kits and other cool stuff for robots. (When i get an arm for my robot, I'll probably buy it from these guys)
- X-10 - All sort of gizmo's that could be useful for a robot like wireless camera
- http://futurebots.com/ - Different parts for robots like motors or processor chips